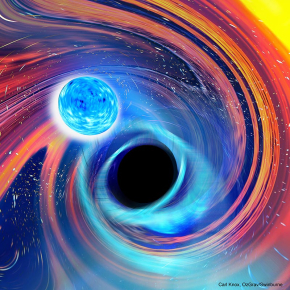
Un signal d’ondes gravitationnelles rebat les cartes des masses des objets célestes

Journée LabEx IRON : 13 ans de succès !
Le LabEx IRON, dont l'IPHC est partenaire, organise sa journée de clôture, qui sera l’occasion de dresser un bilan de 13 années d’existence du réseau, de faire le point sur les avancées scientifiques majeures obtenues pendant cette période et de se projeter vers l’avenir.

Carnets de science | Fascinantes cultures des macaques du Japon
Dans le numéro d'Automne / Hiver 2023 de la revue Carnets de science, Cédric Sueur raconte, au travers d'un Carnet de mission, ses recherches en éthologie sur la macaque du Japon.
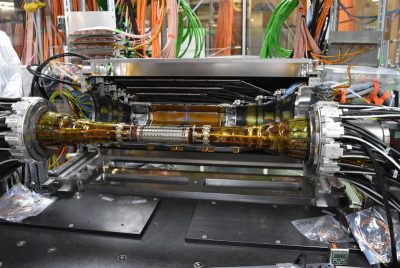
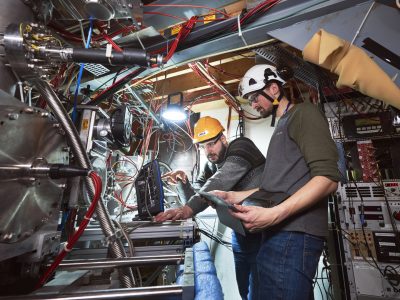
Dans les starting-blocks pour le redémarrage de BELLE-II
Après un arrêt technique d'un an et demi, l'expérience Belle II, située à Tsukuba au Japon, est prête à reprendre des données. L'analyse des données de la campagne 2019-2022 effectuée durant cet arrêt technique a révélé les signes de la désintégration du méson B →K+ ν anti-ν, un des points forts des grandes conférences internationales de l’été dans la discipline.

Penser moins pour manger plus !
Une étude parue dans Mammalian Biology révèle que les souris rayées africaines ont un cerveau 10% plus petit en été, lors de la saison sèche où la nourriture se fait rare.

Disparition de Berrie Giebels, Directeur Adjoint de l’IN2P3
Notre laboratoire est profondément attristé par le décès de Berrie Giebels, physicien au LLR et Directeur Adjoint de l'IN2P3.
Leçon inaugurale de la Chaire Marguerite Perey
Le 16 novembre 2023, Sandrine Courtin a donné sa leçon inaugurale en tant que première titulaire de la nouvelle Chaire Marguerite Perey, intitulée « Nucléosynthèse des éléments chimiques dans l’Univers : une plongée dans le cœur brûlant des étoiles massives ».

Médailles d'Honneur 2023 du CNRS
Nos collègues Philippe Dessagne, Christian Illinger et Denis Oster ont été décorés de la médaille d'Honneur du CNRS et nous les en félicitons. Par leur engagement sans faille, ils sont contribué à faire avancer la science et faire rayonner de notre laboratoire.

Journées Recherche et développements Technologiques de l’IN2P3
Nous avons eu le privilège d’accueillir les Journées Recherche et développements Technologiques de l’IN2P3, où ont été exposés les développements et les recherches technologiques menés actuellement à l'IN2P3 pour répondre aux challenges des expériences actuelles et à venir.

Micro-plastiques : modéliser leur devenir dans l’écosystème aquatique du Grand Est
Le magazine Savoir(s) a rencontré Gaetana Quaranta, qui étudie le devenir des micro-plastiques et leurs interactions avec les nanoparticules de dioxyde de titane dans les eaux de la Thur.
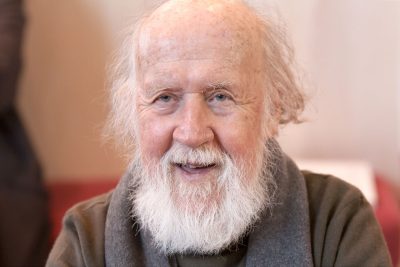
L’IPHC rend hommage à Hubert Reeves
Décédé le 13 octobre à l’âge de 91 ans, Hubert Reeves aura été un personnage emblématique qui a largement contribué à promouvoir l'astrophysique nucléaire, un des axes de recherche de notre laboratoire. Nous souhaitons rendre à travers ces quelques lignes un hommage à ce brillant scientifique et talentueux vulgarisateur.

CNRS Le journal | Le grand hamster d’Alsace en sursis
A travers un reportage proposé par CNRS le Journal, découvrez le travail des scientifiques de l'IPHC pour la préservation du Grand hamster d'Alsace, en danger critique d’extinction depuis 2020.

Journée interdisciplinaire 2023
Fin septembre a eu lieu la première édition de la Journée interdisciplinaire de l'IPHC. De la chimie verte de demain à l'instrumentation de nichoirs à mésanges, en passant par le diagnostic de faisceaux d'ions ou la réalité augmentée, on a pu découvrir sous forme de forum la richesse des projets soutenus en 2021 et 2022, ainsi que leurs premiers résultats.

Caroline Bertagnolli lauréate du Prix Espoir 2023 de l'université de Strasbourg
Caroline Bertagnolli, dont les recherches portent sur la mise au point de procédés pour le recyclage de métaux stratégiques et la dépollution d'eaux contaminées par des métaux toxiques, fait partie des six chercheuses et chercheurs lauréats cette année du Prix « Espoirs de l’Université de Strasbourg ».

Analyser en temps quasi réel les données de différentes populations d’animaux
La RFID est une technologie fréquemment utilisée pour enregistrer les passages et/ou la présence des individus suivis parmi de nombreuses espèces dans le monde, dans les environnements terrestres et aquatiques. L'application de l'IA pour traiter de façon massive et automatisée les jeux de données recueillies est une avancée significative qui vient de faire l'objet d'une publication dans Methods in Ecology and Evolution.
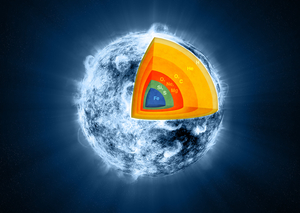
Objectif : percer les secrets des noyaux magiques
L'expérience ISOLTRAP au CERN, à laquelle participent des physiciens de l'IN2P3, est parvenue à mesurer l'infime différence de masse qui distingue le noyau magique d'Indium 99 dans son état fondamental de son équivalent excité. Le résultat, inattendu, met au défi les différents modèles nucléaires existants.
Un financement européen "ERC Proof of Concept Grant" attribué à Alexandre Detappe pour ses travaux contre le cancer
Un financement européen « ERC Proof of Concept Grant » vient d'être attribué fin juillet à Alexandre Detappe pour le projet de recherche « Sub-NK » qui vie à améliorer le traitement des tumeurs solides et liquides.

Une doctorante de l’IPHC sur le podium du concours "Ma BFG en 180 secondes"
Lors de la journée Alumni-Day France Madagascar à l’Institut français de Madagascar, à Tananarive, la jeune Docteure Marie-Claire Raharisoa a remporté la 3ème place au concours "Ma BFG en 180 secondes".