L’instrumentation et l’ingénierie à l’IPHC reposent essentiellement sur une organisation basée sur les services et plateformes techniques.
Services techniques
Les services techniques ont un champ d’action qui englobe l’ensemble des activités réalisées à l’IPHC, et sont destinés à fournir à l’ensemble des agents ou groupes de l’institut un service spécifique en termes de compétences techniques requises (électronique, informatique, mécanique, métrologie de la radioprotection…). Avec un mode de fonctionnement par projet, les services soutiennent les activités récurrentes (maintenance et renouvellement des équipements, veille réglementaire), ainsi que les activités d’innovation et de développement technologique.




Plateformes
Les plateformes hébergées à l’IPHC offrent des services et une expertise de haut niveau pour mener des recherches de pointe. Le laboratoire compte actuellement six plateformes, ouvertes aux collaborations académiques et industrielles dans ses différents domaines d’activité.





Équipe IA – Instrumentation accélérateurs
La mission de l’équipe Instrumentation Accélérateur (EIA) consiste à concevoir et réaliser des lignes de faisceaux, des spectromètres et séparateurs, des systèmes de diagnostic de faisceaux et des développements associés en électronique, informatique et automatique pour les grands projets de l’IN2P3 et du CNRS. Les compétences des six ingénieurs qui composent l’équipe sont liées aux thèmes suivants :
- la conception et la réalisation d’équipements de transport et de manipulation de faisceaux ;
- la dynamique des faisceaux, la sûreté nucléaire et la radioprotection ;
- la réalisation et le développement de diagnostics de faisceaux ;
- l’informatique pour le contrôle des procédés et l’électronique associée ;
- la mécanique et la maintenance des procédés nucléaires ;
- l’intégration des métiers, des solutions et des équipements.
Récemment, l’équipe a participé au démarrage de SPIRAL2, projet pour lequel elle a réalisé intégralement six émittance-mètres pilotés sous EPICS, ainsi que le contrôle-commande de différents diagnostics de faisceaux. L’équipe a également développé deux lignes de faisceau (PRECy , CMS) au cyclotron CYRCé.
SCR – Service compétent en radioprotection
Le service compétent en radioprotection (SCR) assure ses missions conformément aux exigences réglementaires de la législation du travail, de la santé publique et de l’environnement ainsi qu’aux prescriptions de l’Autorité de Sûreté Nucléaire (ASN) pour permettre :
- la détention et l’utilisation d’un accélérateur de particules et de générateurs de rayons X,
- la fabrication de sources non scellées,
- leur distribution en France, dans l’Union européenne et hors d’Europe
- la détention et l’utilisation de sources scellées et non scellées.
L’expertise des ingénieurs dans les différentes activités du service, telles que la sureté, la radioprotection opérationnelle, la métrologie des rayonnements ionisants, le transport classe 7, les connaissances réglementaires et normatives ont permis d’obtenir les autorisations ASN nécessaires aux activités de l’IPHC.
STE – Service technique électronique
Le Service Technique Électronique (STE) de l’IPHC est composé de plus de 40 ingénieurs impliqués dans différents domaines de recherche, et dont les activités couvrent tous les domaines de l’électronique. Les principales activités sont :
- microélectronique et développement de cartes ;
- assemblage de circuits imprimés ;
- micro-câblage et micro-connecteurs ;
- assemblage de détecteurs ;
- système d’acquisition ;
- test et métrologie de la microélectronique.
Le service a, par exemple, assuré la réalisation d’une chaîne d’acquisition complète depuis le boîtier Front End (figure 3) jusqu’au système d’acquisition 64 voies, basé sur le circuit MAROC 3 pour la collaboration internationale JUNO. Il a notamment réussi à doubler la fréquence d’utilisation de la puce pour permettre une cadence d’acquisition maximale de 50kHz et à modifier le système de lecture afin de permettre le report de tous les événements par TCP/IP ou l’ajout d’une carte de déclenchement pour réduire la cadence de déclenchement. L’ensemble du système a été développé et construit, en utilisant les compétences de routage, de production et d’assemblage de cartes ainsi que de développement de logiciels disponibles à l’IPHC

STI – Service technique informatique
Ce service, organisé autour des groupes d’exploitation et de développement logiciel, coordonne l’ensemble des activités informatiques du laboratoire. Composé de 17 agents, il concentre toute l’expertise logicielle présente dans le laboratoire et assure les tâches d’administration du système d’information (réseau et infrastructure, serveurs, logiciels, sécurité) pour l’ensemble du personnel de l’IPHC. Les compétences techniques variées présentes au sein de ce service permettent de fournir une large gamme de services au profit de ses utilisateurs, en mettant l’accent sur l’application de la qualité selon la méthodologie ITIL.
Le service informatique est impliqué dans des réseaux métiers régionaux et nationaux, et a initié plusieurs formations. Il participe activement au projet régional InfoProx coordonné par l’Université de Strasbourg et le CNRS. Afin de faciliter l’activité du laboratoire pendant la pandémie, le service a été particulièrement actif en menant plusieurs projets simultanément :
- l’évolution des équipements du réseau (actifs et passifs), afin de pouvoir bénéficier de la nouvelle bande passante du réseau métropolitain OSIRIS 4 ; permettant également d’être prêts à participer aux niveaux de défi des mises à niveau du LHC ;
- renouvellement des installations de vidéoconférence dans les salles de réunion et l’amphithéâtre ;
- déploiement et maintenance des outils collaboratifs ;
- amélioration des pratiques de cybersécurité.
STM – Service technique mécanique
Impliqué dans la plupart des projets du laboratoire et composé de 12 personnes réparties entre l’atelier mécanique et le bureau d’études, le STM prend en charge des projets complets de haute technologie dans le cadre de collaborations internationales, de l’établissement du cahier des charges initial jusqu’à la participation à l’installation et la mise au point sur site.
L’IPHC maintient un effort constant de maintenance et de développement des machines-outils, afin de disposer d’une infrastructure et de moyens de production récents. Cette approche permet d’étendre progressivement les compétences du STM. Il dispose de connaissances opérationnelles unanimement reconnues dans plusieurs domaines, comme l’impression 3D, la CFAO, la CAO et la simulation.
Ainsi, le STM répond aux sollicitations des équipes projets du laboratoire et, depuis quelques années, apporte une importante contribution au projet de jouvence du trajectographe de CMS (CERN) et au projet d’évolution des moyens de calibration de l’interféromètre à ondes gravitationnelles VIRGO (EGO). /…

SMA – Systèmes de mesure et d’acquisition
L’équipe Systèmes de Mesure et d’Acquisition (SMA) a pour mission de développer l’instrumentation spécifique aux expériences de physique nucléaire et des hautes énergies tout en apportant un soutien technique aux physiciens expérimentateurs, que ce soit à l’IPHC ou dans d’autres laboratoires. Composée de neuf ingénieurs, elle a développé une expertise dans la conception et l’intégration de systèmes de mesure et d’acquisition de données basés sur des cartes électroniques avancées.
L’équipe s’est distinguée par sa participation à la production de DOMs (Digital Optical Module) pour la collaboration internationale KM3NeT (Cubic Kilometer Neutrino Telescope), le projet d’observatoire européen des neutrinos. L’objectif de ce projet est de déployer en Méditerranée deux télescopes sous-marins, qui seront constitués de plus de 6000 DOMs couvrant plusieurs kilomètres cubes d’eau. Un DOM est un détecteur de lumière très sensible, composé de 31 tubes photomultiplicateurs et d’une électronique de traitement, qui permet de détecter dans l’eau les traces de neutrinos provenant du cosmos.

CERF – Conservation, Expérimentation, Règlementation, Faune sauvage
L’équipe Conservation, Expérimentation, Règlementation, Faune sauvage (CERF) est une équipe technique de six ingénieurs et techniciens, tous compétents dans l’utilisation des animaux à des fins scientifiques (UAFS). Ils interviennent sur divers projets scientifiques et travaillent sur une dizaine de modèles d’animaux.
Les compétences de l’équipe se résument par les quatre lettres qui composent son acronyme :
- Conservation : ses missions comprennent le suivi de populations animales (par télémétrie, Capture-Marquage-Recapture, mesures de paramètres physiologiques…) au sein de milieux géonaturels et anthropisés, les renforcements de populations sauvages et le suivi génétique de l’évolution des populations, sauvages ou captives.
- Expérimentation : tous les agents sont compétents dans l’Utilisation des Animaux à des Fins Scientifiques (UAFS). Leurs missions sont la mise en œuvre des procédures expérimentales, le développement et/ou l’utilisation de dispositifs expérimentaux, la gestion et la maintenance de 14 box d’hébergement intérieurs (aux paramètres environnementaux contrôlables) et 6 box extérieurs, ainsi que 4 pièces spécialisées (chirurgie, calorimétrie, pièce humide pour espèces aquatiques/semi aquatiques, et infirmerie).
- Réglementation : l’équipe comprend le délégataire Apafis, le délégataire DDPP, le responsable Compétences en UAFS, ainsi que le responsable de la SBEA, ce qui constitue un outil précieux pour les concepteurs de DAP, depuis l’aide à la rédaction, le suivi éthique des projets et jusqu’à l’aide à la réhabilitation des animaux en fin de projet.
- Faune sauvage : le personnel est compétent dans la biologie et la zootechnie de plusieurs modèles dits « exotiques », et il maitrise les gestes en UAFS spécifiques à cette faune sauvage.
C4Pi – Centre de compétences de capteurs CMOS à pixels intégrés
Le Centre de Compétence pour les Capteurs CMOS à Pixels Intégrés (C4PI) est une plateforme composée d’une vingtaine d’ingénieurs et de techniciens, et dont l’activité principale est le développement de capteurs CMOS à pixels (CPS) monolithiques, depuis la définition du cahier des charges et la conception jusqu’à la validation et la construction. La plateforme C4PI travaille principalement sur des projets à moyen et long terme en partenariat avec des collaborateurs nationaux et internationaux. Labellisée IN2P3, elle se compose de deux groupes :
- microtechnique, assurant l’intégration, la métrologie et la validation des systèmes électroniques hybrides nécessaires au développement et à la production d’éléments de détection ;
- la microélectronique, spécialisée dans le développement de capteurs à pixels intégrés en technologie CMOS (ou CPS pour CMOS Pixel Sensors).
C4PI bénéficie d’une expertise de pointe dans le développement de capteurs CMOS grâce à une R&D innovante menée depuis de nombreuses années à l’IPHC. Parmi les nombreuses réalisations de C4PI figurent le premier capteur CMOS à pixels au monde à avoir équipé un détecteur de particules avec cette technologie (le PXL de l’expérience STAR aux États-Unis), ainsi que le module de détection double face ultraléger PLUME, avec lequel est construit le détecteur BEAST pour l’expérience BELLE2. C4PI a également participé à la conception du détecteur ALPIDE et a été l’un des cinq sites de construction du détecteur résultant, le ITS2 de l’expérience ALICE. ALPIDE est la référence actuelle des capteurs à pixels pour la détection des particules chargées.
En 2020, C4PI a lancé un ambitieux programme de R&D pour créer les premiers capteurs géants et incurvés de la discipline, typiquement de la taille d’une feuille A4. Ce projet international au CERN, dans lequel C4PI, seul groupe français, joue un rôle de premier plan, redéfinira l’état de l’art dans le domaine. Tous les développements cités contribuent à préfigurer les premières couches de détection des futurs collisionneurs e+e-.

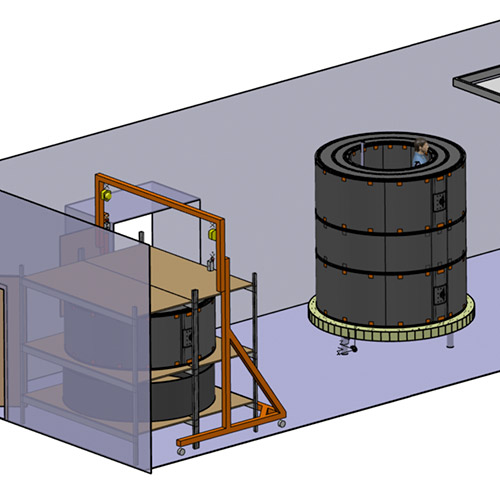
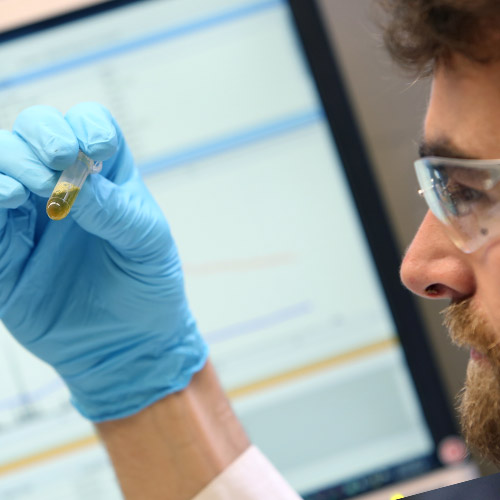
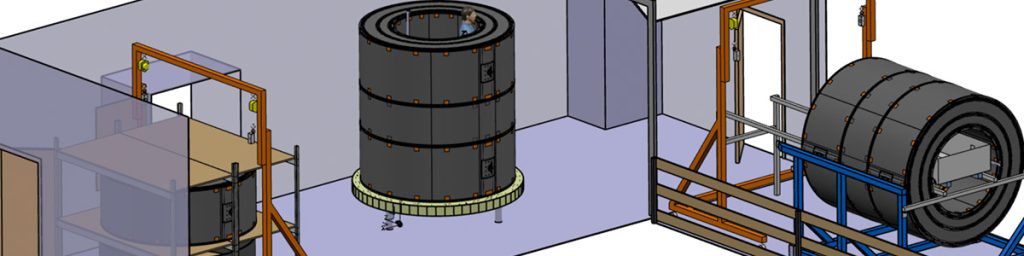
CYRCé – Cyclotron pour la recherche et l’enseignement
CYRCé est une plateforme scientifique gérée par une équipe de huit personnes. Elle intègre un cyclotron de 25 MeV aux caractéristiques uniques en Europe, permettant la production de radioisotopes pour l’imagerie nucléaire (18F, 64Cu, 89Zr, et bientôt 68Ga et 67Cu) et la production de molécules marquées pour le diagnostic, le suivi ou le traitement médical. Le cyclotron est couplé à la ligne de radiobiologie expérimentale PRECy et au système d’imagerie PET/CT X, ainsi qu’à une ligne de test de capteurs pour le CMS (figure 5). La plateforme CYRCé est un lieu unique pour l’étude des effets biologiques et leur suivi à moyen et long terme. La plateforme est organisée autour de quatre activités principales :
- l’utilisation de protons (pour la production d’isotopes ou l’irradiation d’échantillons) ;
- la plate-forme d’imagerie ;
- l’animalerie ;
- les laboratoires de biologie.
La plateforme est labellisée par l’IN2P3 et CORTECS, le réseau de l’Université de Strasbourg. La plateforme d’imagerie est également labellisée IBiSA depuis 2019.
Site web de la plateforme : cyrce.fr

PAI – Plateforme analytique des inorganiques
La plateforme Analytique des Inorganiques (PAI) offre un savoir-faire unique dans le domaine de l’analyse minérale. Neuf personnes participent à toutes les activités de cette plateforme et permettent :
- d’identifier et de quantifier la quasi-totalité des éléments du tableau périodique ;
- d’analyser les éléments chimiques dans toutes les gammes de concentrations, jusqu’aux ultra-traces ;
- de manipuler tous types d’échantillons (milieux biologiques, matériaux et nanomatériaux, composés organométalliques, etc.).
Il est ouvert à tous les acteurs académiques, ainsi qu’au monde socio-économique au niveau régional, national ou international, pour des collaborations de recherche ainsi que pour des analyses spécifiques.

PSGE – Plateforme protéomique Strasbourg Grand Est
La Plateforme protéomique de Strasbourg Grand Est propose un ensemble de services liés à la protéomique en s’appuyant sur une équipe expérimentée de chercheurs et d’ingénieurs. Elle est accessible à travers son offre de services, mais aussi par la mise en place de projets de recherche collaboratifs pour des demandes plus complexes. Les services couvrent l’ensemble des analyses de routine liées à l’identification et à la quantification des protéines contenues dans des échantillons biologiques complexes. L’expertise de la plateforme couvre :
- l’identification et la quantification des protéines dans des protéomes complexes (protéomique « shotgun » sans étiquette ou ciblée) ;
- l’analyse bioinformatique de grands ensembles de données protéomiques (y compris le séquençage de novo pour les organismes non séquencés) ;
- identification des partenaires de complexes multiprotéiques ;
- caractérisation complète des protéines thérapeutiques ;
- caractérisation détaillée des modifications post-traductionnelles ;
- étude des interactions non covalentes par spectrométrie de masse.
La plateforme est certifiée ISO 9001 et NFX-50-900 (figure 6). Elle dispose également des labels IBiSA et CORTECS, et est intégrée au réseau du Canceropôle Grand Est.
Site web de la plateforme : plateforme-psge.u-strasbg.fr

ProFI – Infrastructure nationale de protéomique
ProFI est une structure particulière au sein de l’IPHC. Créée en 2012, cette infrastructure de recherche (IR) est désormais organisée comme une fédération nationale de recherche du CNRS et du CEA (FR2048 CNRS/CEA) comprenant trois sites (Grenoble, Toulouse et Strasbourg). Ses activités de R&D se concentrent sur le développement d’outils et de méthodes pour la caractérisation structurelle et fonctionnelle des protéomes et des complexes protéine-protéine. En plus de ses efforts de R&D, ProFI vise à offrir à la communauté des services d’analyse protéomique à haute valeur ajoutée réalisés dans le cadre de collaborations ou de prestations de services. ProFI participe également à la diffusion de son expertise et de ses outils au sein de la communauté scientifique par un fort investissement dans des actions de formation et de communication. Au niveau régional, il est impliqué dans la plateforme BIGEst et est donc un acteur majeur de l’animation locale du réseau de l’Instituts Français de Bioinformatique. Au niveau national, le ProFI est impliqué dans :
- les actions de coordination vers la communauté protéomique (rédaction d’un document de prospective) ;
- les interactions avec les autres infrastructures INBS (Infrastructures Nationales en Biologie et Santé).
Au niveau international, ProFI participe à des projets d’envergure (ex : partenaire français du projet international Human Proteome Project, figure 7) et à des actions de communication qui contribuent à la visibilité de la France dans la communauté scientifique protéomique mondiale (ex : ELIXIR).
ProFI interagit avec les autres IR nationales françaises afin de proposer à la communauté scientifique un ensemble de méthodes, de technologies et de logiciels pouvant être utilisés dans des projets biologiques ou cliniques. Par exemple, ProFI est impliqué dans deux projets nationaux visant à fournir de nouveaux outils bioinformatiques pour une meilleure gestion de l’ensemble de données multi-omiques (ProMetIS) ou l’intégration de données structurelles 3D dans l’ensemble de données interactomiques (Prote3DNet).
Site web de la plateforme : profiproteomics.fr

RaMsEs – Radioprotection et mesures environnementales
La plateforme Radioprotection et Mesures Environnementales (RaMsEs) offre des services dans le domaine des mesures et analyses de la radioactivité en laboratoire et in situ. Ses trois ingénieurs et techniciens à haute compétence en métrologie nucléaire mènent des activités dans le domaine de l’environnement et de la santé. Les activités de ce service couvrent les catégories suivantes :
- analyses et expertises : mesures de faibles niveaux de radioactivité, expertises radiologiques sur site, développement de techniques d’analyses multi-éléments (PIXE, XRF) ;
- radioprotection et contrôles : contrôles réglementaires des installations industrielles dans le cadre des autorisations de l’ASN ;
- expertises radiologiques sur sites industriels.
Dans le cadre de sa participation au réseau Becquerel de l’IN2P3, la plateforme RaMsEs réalise, avec le laboratoire Subatech de Nantes, le suivi radioécologique des centrales nucléaires de la Loire. Ces mesures, réalisées par spectrométrie gamma in-situ, complètent les mesures effectuées en laboratoire sur des échantillons de sol.

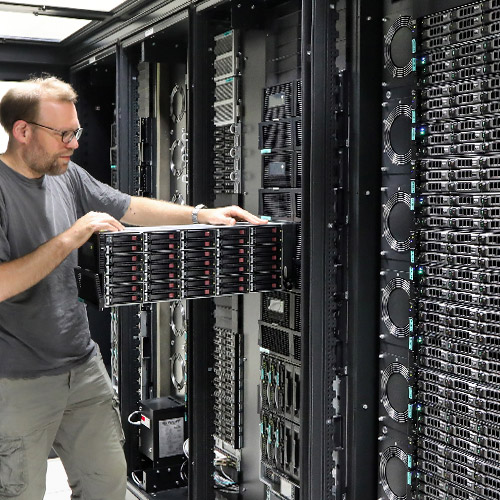
SCIGNE – Scientific cloud computing in Grand-Est
La plateforme SCIGNE est dédiée au traitement et à la gestion de données scientifiques massives. Créée en 2007 pour répondre aux besoins en ressources de calcul des expériences scientifiques CMS et ALICE au CERN, elle s’est ouverte en 2009 aux utilisateurs d’autres disciplines scientifiques, et en particulier aux communautés de bio et chémo-informatique. Forte d’une équipe de cinq ingénieurs aux compétences techniques et scientifiques complémentaires, elle offre une gamme de services (développement de logiciels, formation, élaboration de plans de gestion des données, gestion des flux de travaux informatiques, etc.) pour répondre aux défis du Big Data et de la mise en œuvre des politiques de la Science Ouverte. Accessible aux acteurs scientifiques régionaux, nationaux et internationaux, qu’ils soient issus du secteur public ou privé, elle a été certifiée par l’IN2P3 en 2017 et par le réseau CORTECS de l’Université de Strasbourg en 2020. Ses services sont proposés au niveau régional en partenariat avec le mésocentre de l’Université de Strasbourg, au niveau national par ses collaborations avec les infrastructures de recherche France Grilles et l’Institut Français de Bioinformatique (IFB), et au niveau international par son implication dans EGI et dans les collaborations scientifiques BELLE II, ELIXIR, et LHC.
Cette plateforme est reconnue au niveau national et international pour son expertise en matière de Cloud Computing dans le contexte de la recherche scientifique, que ce soit par la mise en place d’environnements de recherche virtuels, la formation d’ingénieurs et de chercheurs ou les développements de logiciels interopérables et distribués. L’ensemble de ses réalisations lui permet d’être impliquée dans plusieurs projets européens H2020.
Site web de la plateforme : scigne.fr
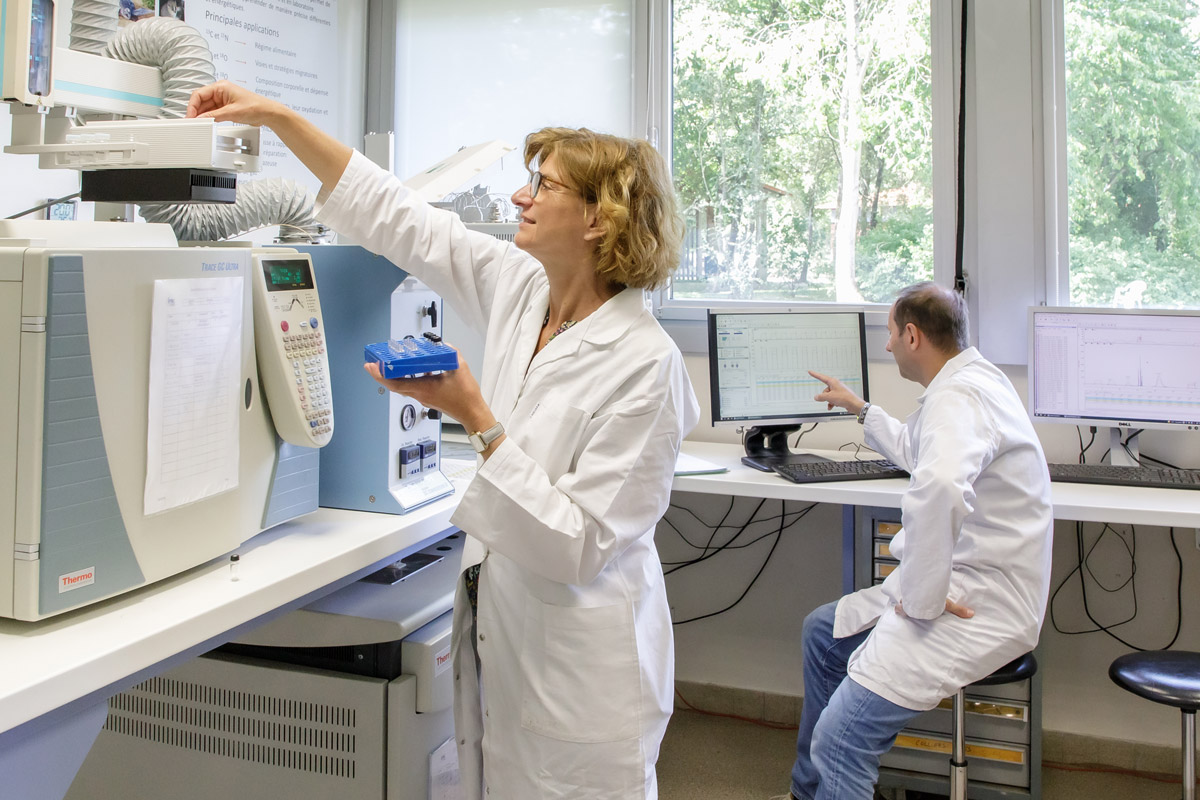
M2IS – Spectrométrie isotopique
La plateforme de Spectrométrie isotopique (M2IS) est une plateforme scientifique gérée par une équipe de quatre personnes. Elle est spécialisée dans la mesure et l’analyse de biomolécules marquées par des isotopes stables. Ces analyses, particulièrement intéressantes en écologie, biologie animale et physiologie humaine, permettent de quantifier de nombreuses variables biologiques en conditions de vie libre et en laboratoire. Les molécules utilisées comme traceurs sont ainsi exploitées pour étudier différentes variables métaboliques (flux, turnover, oxydation de substrats corps entiers et tissus) et énergétiques (composition corporelle, dépense énergétique totale, flux hydrique), et pour explorer de nombreuses hypothèses scientifiques.
Afin de pouvoir répondre aux différentes demandes, l’équipe en charge de la plateforme développe de nouvelles méthodes expérimentales, ainsi que les standards associés pour garantir la qualité et la fiabilité des résultats.
L’équipe de la plateforme M2IS gère l’ensemble du cycle de vie des analyses, de la conception et à la réalisation des protocoles expérimentaux, de l’analyse isotopique et à l’interprétation des résultats.
La plateforme est labellisée CORTECS, le réseau des plateformes de l’Université de Strasbourg.
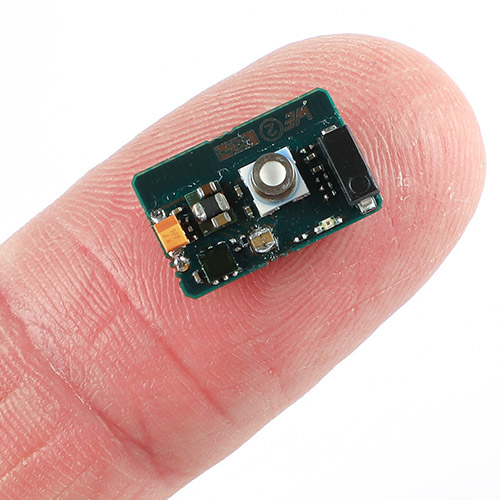
MIBE – Métrologie et instrumentation en biologie environnementale
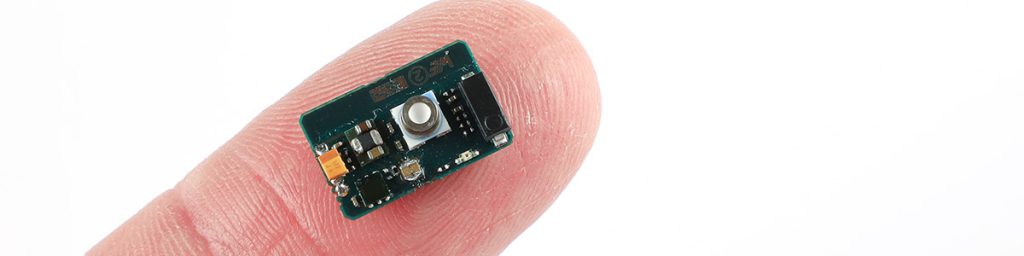
L’équipe Métrologie et Instrumentation en Biologie et Environnement (MIBE) a pour mission de développer une instrumentation innovante pour le suivi des données physiologiques et environnementales des animaux sauvages. Composée de sept personnes, cette équipe permet aux chercheurs de réaliser des projets de recherche qui ne peuvent être entrepris dans les mêmes conditions avec les moyens instrumentaux préexistants. Créé en septembre 2010, ce service a travaillé à la conception et au développement de trois types principaux d’équipements :
- des enregistreurs miniatures de données physiologiques et environnementales portés par des animaux sauvages (bio-loggers) ;
- robots destinés à l’étude des manchots de la région Antarctique (animatronics), afin de pénétrer dans les zones de résidence et de reproduction sans perturber les animaux ;
- des équipements de lecture RFID (identification par radiofréquence) capables de lire à courte distance une puce électronique passive préalablement injectée sous la peau de l’animal.
Un exemple de résultat obtenu chez le manchot royal juvénile grâce à l’équipement conçu par cette équipe est la mise en évidence d’un phénomène de maturation physiologique au cours des trois premiers mois de vie en mer et d’une phase transitoire liée à la perte de poids post-mue.
Site web de la plateforme : MIBE Plateform